程序如下:
#include<reg52.h>
#define uchar unsigned char
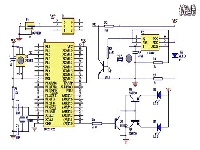
sbit JDQ=P3^7; //继电器接P3.7
sbit FMQ=P3^6;
sbit LED=P0^0;
sbit LEDra=P0^1;
sbit LEDar=P0^2;
uchar dat[4];
int i=0;
void Delay(unsigned int ii) //1mS
{
unsigned int jj;
for(;ii>0;ii--)
for(jj=0;jj<125;jj++)
{;}
}
void init_serialcom( void ) //串口通信初始设定
{
TMOD|=0x20; //定时器中的方式控制寄存器TMOD,设置T1为工作模式2,当TL1溢出时,TH1的值自动装入TL1,TH1和TL1当然都要赋值.TMOD前四位T1,后四位T0:GATE=0,C/T=0,M1=0,M0=01
TR1=1; //定时器中的运行控制寄存器TCON,允许T1计数
TH1=0xfd; //波特率9600
TL1=0xfd;
SCON = 0x50 ; //SM0=0;SM1=1;REN=1; UART为模式1,8位数据,允许接收,
PCON |= 0 ; //SMOD=1;波特率的问题。
IE|=0x90 ; //中断允许寄存器IE,P97,EA终端总允许标志位,ES串行口中断允许位
}
void jdq() interrupt 4{ //void 函数名() interrupt 4
EA=0;
if(RI)
{
RI=0;
if(i<4)
{
dat[i] = SBUF;
i++;
}
if(dat[2]==0x10 && dat[0]==0xE5 && dat[1]==0xA1 && dat[3]==0x4E) //E5A1 104E
{
JDQ=0;//吸合
LED=0;//P0口LED亮
LEDra=1;
LEDar=1;
}
else if(dat[2]==0x11 && dat[0]==0xE5 && dat[1]==0xA1 && dat[3]==0x4D) //E5A1114D
{
JDQ=1; //释放
LED=1; //P0口LED灯灭
LEDra=1;
LEDar=1;
}
else
{
LEDra=0;
LEDar=0;
LED=1;
}
if(i>=4)i=0;else;
}
EA=1;
}
main() //串口方式1发送时的定时信号,也就是移位脉冲,由定时器1产生。不是定时器0。
{
init_serialcom();
Delay(10);
while(1);
}
第一次独立写的,程序粗糙了点,但是完美运行。
发送:E5A1 104E,继电器闭合
E5A1 114D,继电器断开
这里控制用到了四个字节,所以在中断程序里面我定义了一个数组,最后判断这四个字节是否都正确。如果一个字节的话更简单。