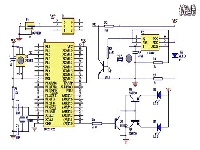
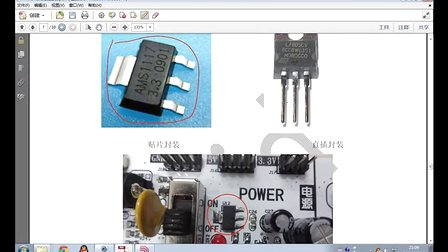
倒车雷达超声波测距源程序对应的硬件是:单片机选择用AT89C51单片机,晶振选择用12M,四位共阳数码管显示,接收电路使用的是CX20106A,三个按键用于设置报警定值,设置有蜂鸣器报警电路。
#include'reg51.h'
#include'math.h'
#define uint unsigned int
#define uchar unsigned char
long int time;
bit CLflag;
char cshu;
#define T12us (256-12)
sbit VOLCK=P1^0;
//接收从P3^2口输入,采用外部中断方式
sbit S1=P2^1;
sbit S2=P2^3;
sbit S3=P2^5;
sbit S4=P2^7;
sbit alam=P3^7; //报警
unsigned char number[5];
unsigned char temp_number[5];
unsigned char fr_alam; //报警频率控制计数
unsigned char icont; //距离计数
char code table[] ={0x5F,0x44,0x9D,0xD5,0xC6,0xD3,0xDB,0x45,0xDF,0xD7}; //数字0-9的编码
//{0x03,0x9f,0x25,0x0d,0x99,0x49,0x41,0x1f,0x01,0x09};
void delay( int j)
{
int i;
for(i=0;i
}
void display(void)
{
P0=~table[number[4]];
S1=0;
delay(200);
S1=1;
P0=~(table[number[3]]|0x20);
S2=0;
delay(200);
S2=1;
P0=~table[number[2]];
S3=0;
delay(200);
S3=1;
P0=~table[number[1]];
S4=0;
delay(200);
S4=1;
}
void init_CTC(void )
{
TMOD = 0x21;
ET0 = 0;
}
void init_INT( )
{
IP=0x01;
TCON=0;
}
//=========距离与频率之间的转化==============
void Distance_Frequency(void)
{
//以下语句用于计算距离与报警的频率大小
if(number[3]>0) //表示距离大于1米时,不报警
icont=0;
else //否则
{
if(number[2]>0) //小于1米时,但分米大于0时,报警频率与分米的数据成正比
{
switch(number[2])
{
case 9: icont=9; break;
case 8: icont=8; break;
case 7: icont=7; break;
case 6: icont=6; break;
case 5: icont=5; break;
case 4: icont=4; break;
case 3: icont=3; break;
case 2: icont=2; break;
case 1: icont=1; break;
default: break;
}
}
else //距离只在厘米时,高频率输出报警
{
if(number[1]>0)
icont=1;
else
icont=0;
}
}
}
void Timetojuli(void)
{
long i;
i=(long)time*170;
temp_number[4]=i/10000000;
i=i-temp_number[4]*10000000;
temp_number[3]=i/1000000;
i=i-temp_number[3]*1000000;
temp_number[2]=i/100000;
i=i-temp_number[2]*100000;
temp_number[1]=i/10000;
i=i-(long)temp_number[1]*10000;
temp_number[0]=i/1000;
//以下用于控制是否测到距离,如全为0,表明没有测到距离
if((temp_number[4]!=0)||(temp_number[3]!=0)||(temp_number[2]!=0)||(temp_number[1]!=0))
{
number[4]=temp_number[4]; //更新一次数据
number[3]=temp_number[3];
number[2]=temp_number[2];
number[1]=temp_number[1];
number[0]=temp_number[0];
Distance_Frequency(); //转化一次
}
}
void serve_INT0( ) interrupt 0
{
TR0=0;
EX0=0;
time=(long)TL0;
time+=(long)TH0*256;
Timetojuli(); //更新一次数据
CLflag=1;
TH0=0;
TL0=0;
}
void CTC0_INT ( ) interrupt 1
{
TR0=0;
ET0=0;
}
void CTC1_INT ( ) interrupt 3
{
VOLCK=~VOLCK;
cshu++;
}
void main()
{
init_CTC( );
init_INT( );
CLflag=1;
cshu=0;
IE=0x80;
ET1=1; ET0=1;
TR1=0; TR0=0;
TL1=T12us; TH1=T12us;
while(1)
{
CLflag=0;
cshu=0;
EX0=0;
TH1=T12us;
TL1=T12us;
TL0 = 0; TH0 = 0;
VOLCK=0;
TR1=1;
while(cshu<20) ;
TR1=0;
TR0=1;
EX0=1;
display(); //调用显示
// Distance_Frequency(); //调用距离频率转化程序
fr_alam++; //程序执行次数加1 用于控制报警频率与距离成正比
if(icont>0) //表示距离控制位达到报警时
{
if(fr_alam>=icont)
{
fr_alam=0;
alam=~alam; //蜂鸣器取反一次,即响一声
}
}
else //不报警时
{
alam=1;
}
}
}