第八届飞思卡尔智能车-摄像头组-山东工商学院-深蓝航速
时间:11-10 10:12
查看:1157次
下载:163次
简介:
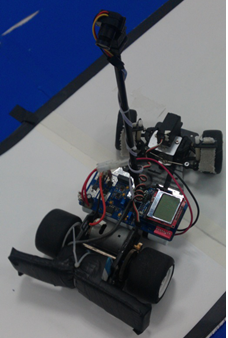
本系统采用32位MK60DN512ZVLL10 Kinetis ARM Cortex-M4单片机为控制核心,通过CMOS摄像头采集的图像经过硬件二值化获取赛道信息,从而判断道路状况。根据赛道装框运算并输出PWM控制舵机的转向角度,同时通过光电编码器获得速度反馈,经过PID实现智能车的调速控制。在调试过程中使用了C#上位机,蓝牙无线通信等手段进行辅助,经验证本系统方案可行。